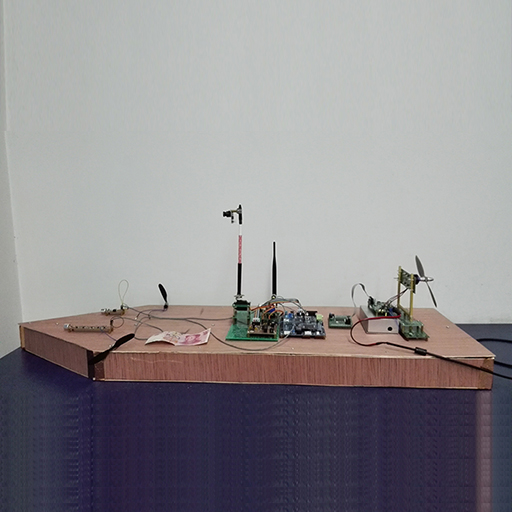
水上智能机器人主要基于DSP作为控制系统核心,实现对恶劣复杂环境水域的环境检测功能。机器人具有类似无人机远程控制和图像传输功能,同时采用气垫船动力系统结构布局,不仅能实现多通道采样,实时数据传输功能,同时对于一些普通船只无法到达或有一定危险的水域环境具有快速应变和适应能力。
登录可查看
暂时还没有添加项目历程

 手机微单-轻慢生活的开始
手机微单-轻慢生活的开始 高校大学生专属闲置物品交易交换平台
高校大学生专属闲置物品交易交换平台 致力山区,整合资源,改良支教,让爱延续
致力山区,整合资源,改良支教,让爱延续 打造校园精英俱乐部,实现校企资源对接
打造校园精英俱乐部,实现校企资源对接